The workbench
A single window for scene authoring, simulation, beamforming, and image inspection.
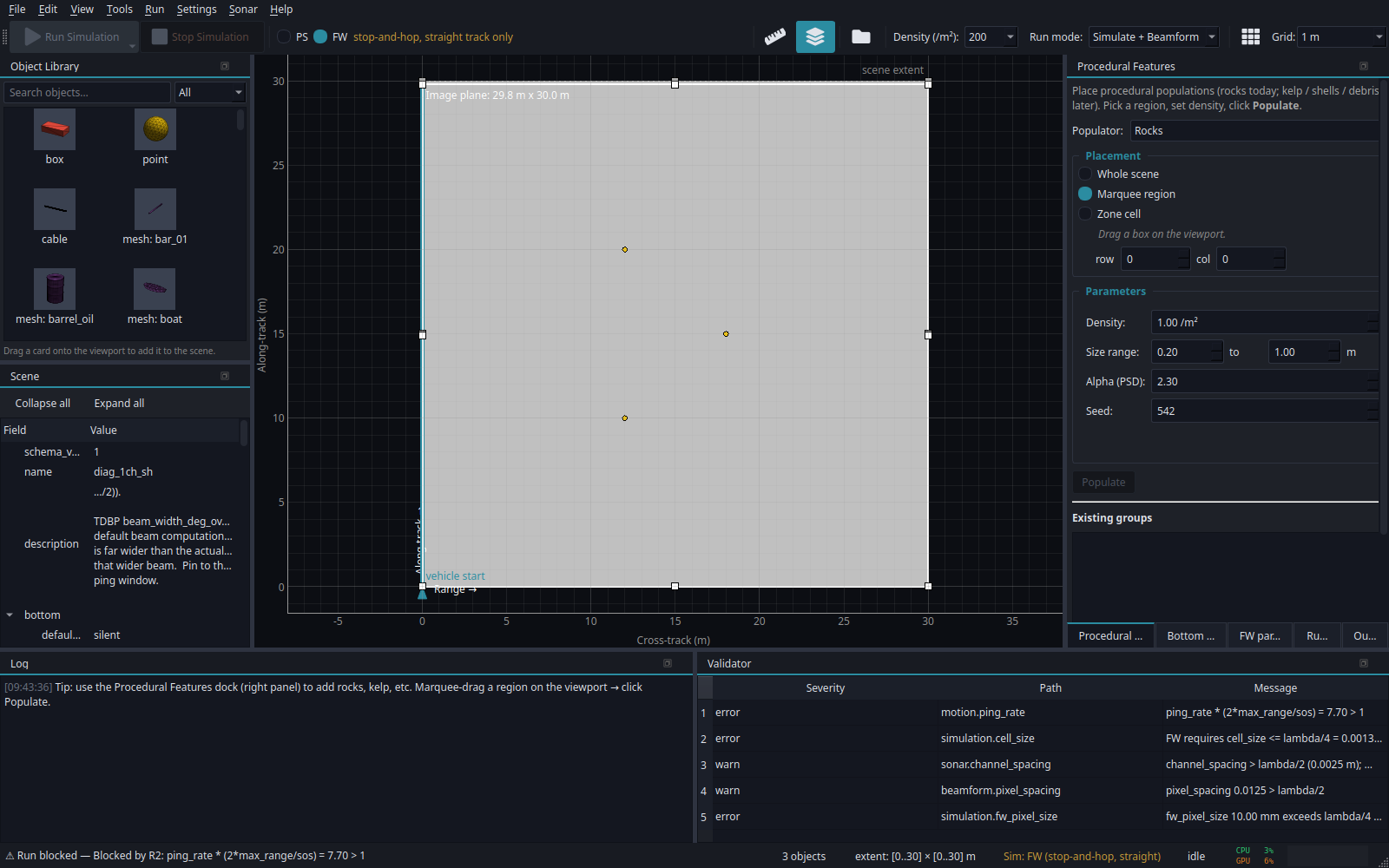
ApertureLab is one window for scene authoring, simulation, beamforming, and image inspection. Below: the panels and dialogs that make up the workflow, captured against a live scene.
A single window for scene authoring, simulation, beamforming, and image inspection.
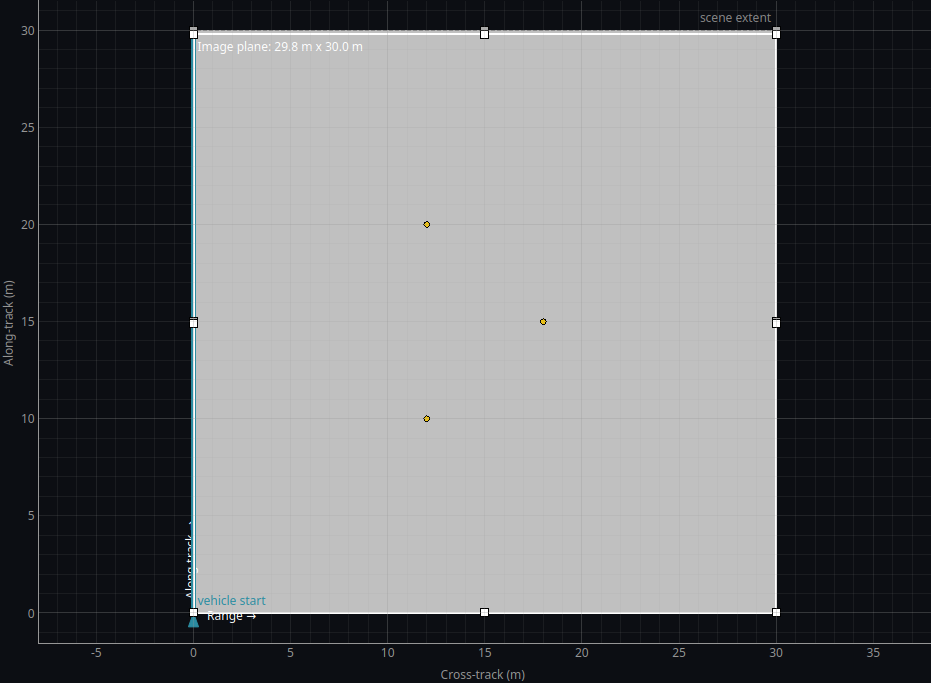
A live 2D plan view of the scene: image plane, vehicle start, range vector, and extents.
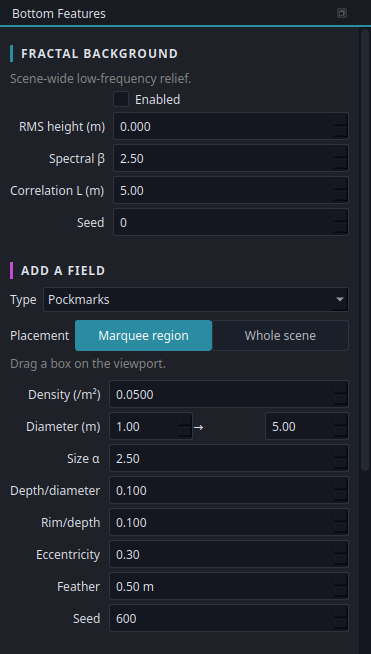
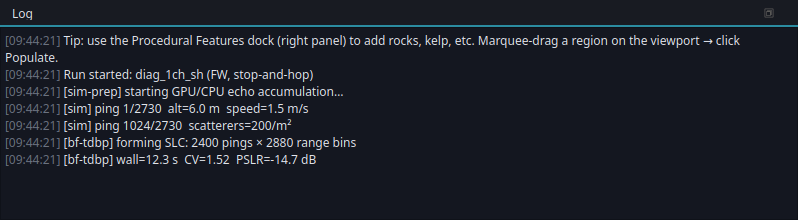
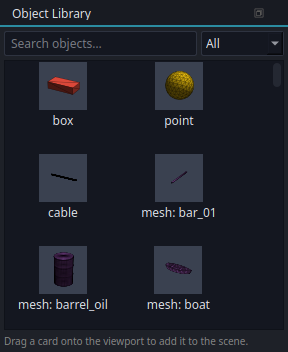
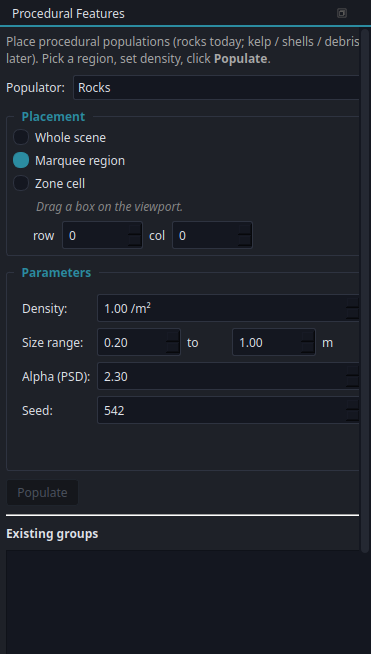
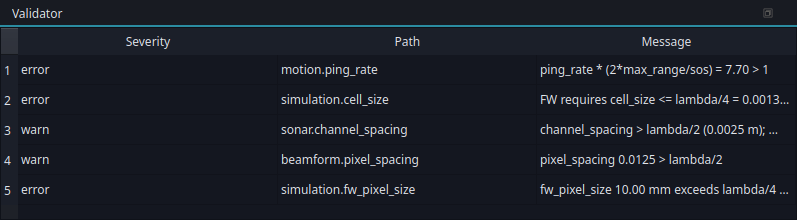
Dockable panels for the object library, procedural generation, seafloor authoring, validation, and run history.
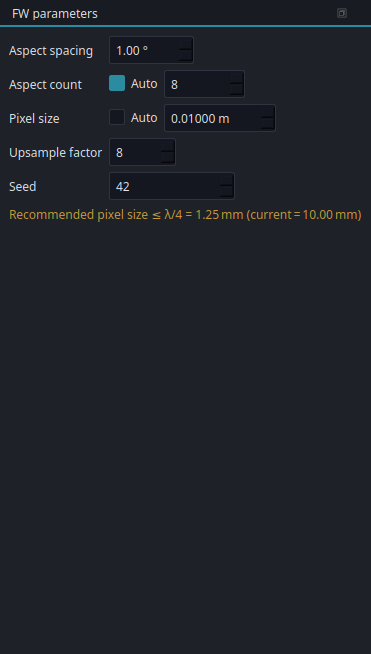
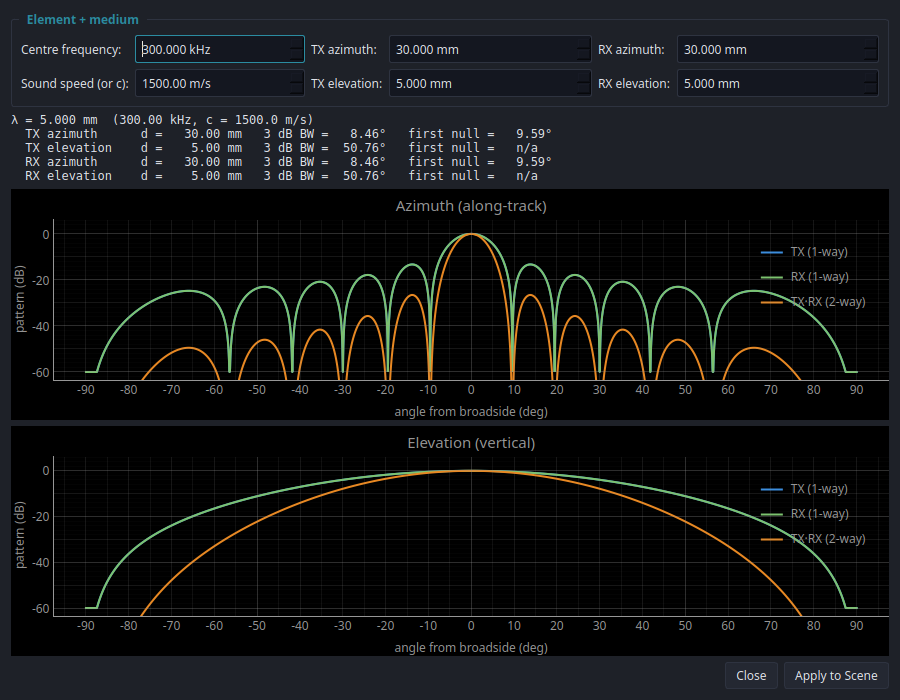
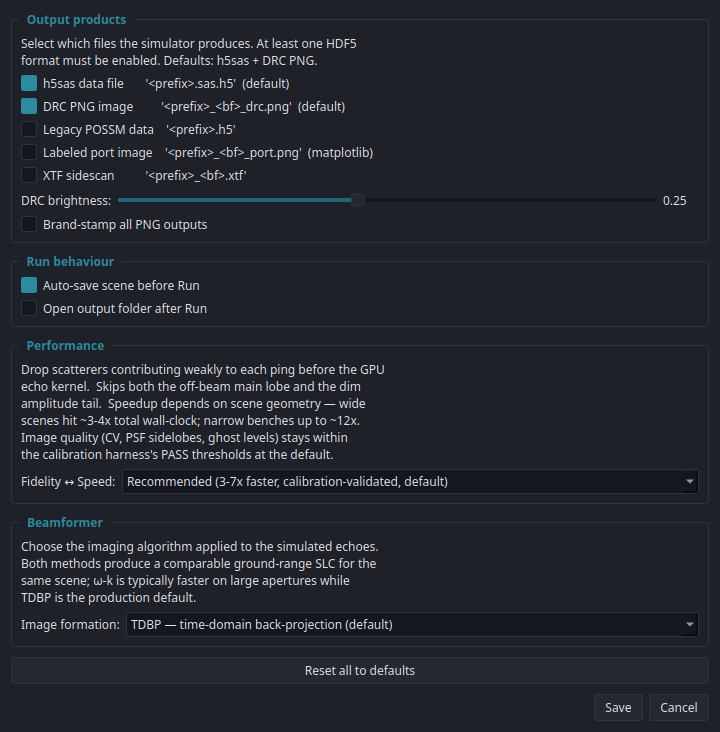
Sonar geometry, beam-pattern derivation, and end-to-end output preferences (HDF5, XTF, MSHDF, DRC images).
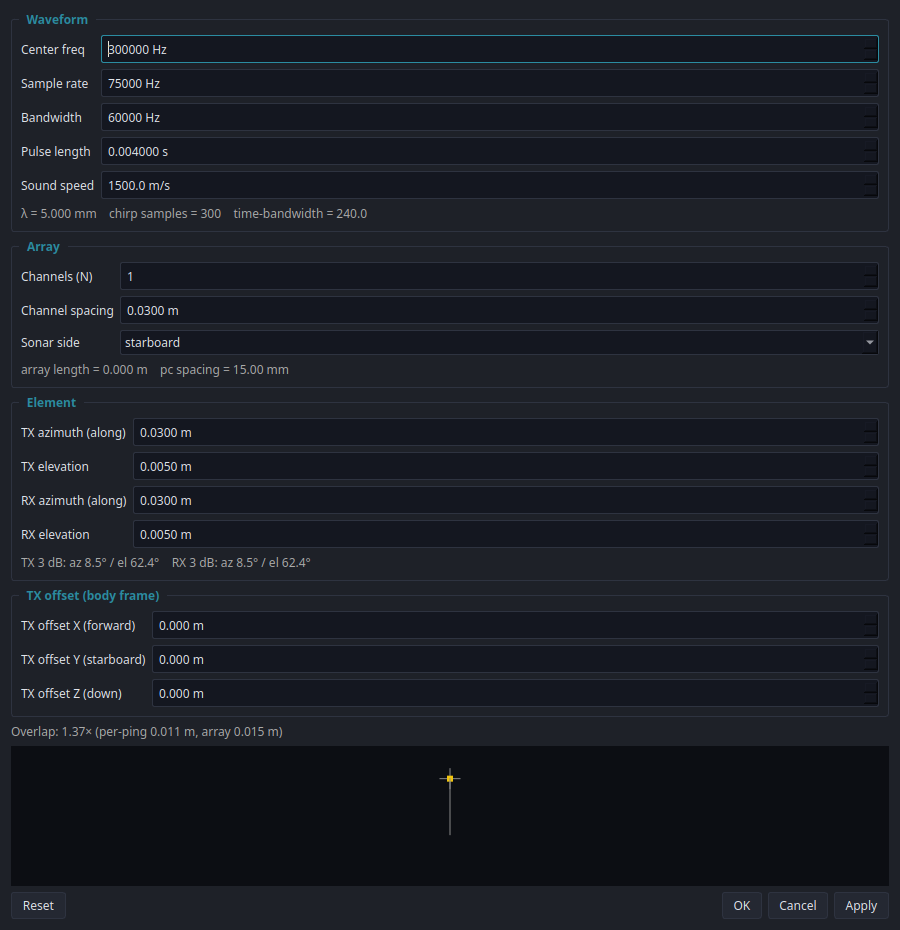
A PoSSM-style coherent point-scatterer simulator: every ping is a time-domain sum of per-scatterer echoes, each carrying its own delay, amplitude, and carrier phase.
For ping \(k\) on channel \(c\), the complex baseband pressure is a coherent sum over scatterers \(i\):
\[ s_{k,c}(t) \;=\; \sum_{i} a_{k,c,i}(t)\;p\!\left(t - \tau_{k,c,i}(t)\right)\;\exp\!\left(-j\,2\pi f_c\,\tau_{k,c,i}(t)\right), \]where \(p(\cdot)\) is the baseband LFM chirp, \(f_c\) is the carrier (300 kHz default), and
\[ \tau_{k,c,i}(t) \;=\; \frac{\lVert \mathbf{x}_i - \mathbf{x}^{TX}_k(t)\rVert \;+\; \lVert \mathbf{x}_i - \mathbf{x}^{RX}_{k,c}(t)\rVert}{c_s} \]is the bistatic two-way time between the TX phase center and the \(c\)-th RX element. Production runs are continuous-motion: the RX position is evaluated at the echo arrival time, not at ping start. Stop-and-hop is disabled by default and is forbidden in production imaging.
The bistatic arrival time \(\tau\) is not a closed-form quantity, because the receiver moves while the echo is in flight. The true \(\tau\) satisfies the implicit equation
\[ \tau \;=\; \frac{d_{TX} \;+\; \bigl\lVert \mathbf{x}_i - \mathbf{x}^{RX}(\tau)\bigr\rVert}{c_s}, \qquad \mathbf{x}^{RX}(\tau) \;=\; \mathbf{x}^{RX}_0 + \mathbf{v}\,\tau, \]i.e. \(\tau\) is the time at which the outgoing wavefront, after bouncing off the scatterer, intersects the receiver's straight-line trajectory. With the closed-form expansion of \(d_{RX}(\tau)^2\) along the trajectory,
\[ d_{RX}(\tau)^{2} \;=\; d_{RX}(0)^{2} \;-\; 2\,\tau\,\bigl(\mathbf{v}\!\cdot\!\Delta\mathbf{x}_{RX}\bigr) \;+\; \tau^{2}\,\lVert\mathbf{v}\rVert^{2}, \qquad \Delta\mathbf{x}_{RX} = \mathbf{x}_i - \mathbf{x}^{RX}_0, \]the implicit equation becomes a Picard fixed-point iteration that we solve directly on the GPU:
\[ \tau^{(n+1)} \;=\; \frac{d_{TX} \;+\; \sqrt{\,d_{RX}(0)^{2} \;-\; 2\,\tau^{(n)}\,(\mathbf{v}\!\cdot\!\Delta\mathbf{x}_{RX}) \;+\; \tau^{(n)\,2}\,\lVert\mathbf{v}\rVert^{2}\,}}{c_s}, \qquad \tau^{(0)} \;=\; \frac{d_{TX}+d_{RX}(0)}{c_s}. \]The initial guess \(\tau^{(0)}\) is exactly the stop-and-hop delay. Each iteration is a contraction with rate \(\sim\!\lVert\mathbf{v}\rVert/c_s\) — about \(10^{-3}\) at SAS speeds — so one iteration drops the residual TOF error from \(O(v R / c_s^{2})\) (sub-cm at 100 m range) into the noise floor of the FP64 carrier phase. The default is one iteration (\(\mathtt{PS\_N\_TOF\_ITERS}=1\)), chosen not for speed but for an exact match to the beamformer's \(\mathtt{n\_tof\_iters}=1\) MoComp model: sim and BF use the same \(\tau\), so any residual phase error cancels coherently in TDBP rather than smearing the PSF.
The signature of getting this wrong is the asymmetric along-track sidelobe pattern of Cook & Brown (2009) — the linear-phase-error fingerprint of a stop-and-hop sim driven through a continuous-motion beamformer. The solver above is what keeps it out of the imagery.
The complex amplitude \(a_{k,c,i}\) factorizes (linear pressure, not intensity):
\[ a_{k,c,i} \;=\; \rho_i \cdot \underbrace{B_{TX}(\hat{\mathbf{u}}^{TX}_i)\,B_{RX}(\hat{\mathbf{u}}^{RX}_{c,i})}_{\text{rectangular-piston sinc}}\;\cdot\;\underbrace{\cos\theta_i^{n}}_{\text{Lambert}}\;\cdot\;\underbrace{\frac{1}{d_{TX,i}\,d_{RX,c,i}}}_{\text{two-way spreading}}\;\cdot\;\underbrace{e^{-\alpha(f_c)\,(d_{TX,i}+d_{RX,c,i})}}_{\text{Thorp absorption}}\;\cdot\;V_i. \]Each piston is a separable 2D sinc keyed on body-frame direction cosines, \(B(\hat{\mathbf{u}}) = |\mathrm{sinc}(\pi L_{az} u_x / \lambda)|\cdot|\mathrm{sinc}(\pi L_{el} u_z / \lambda)|\); attitude (R/P/Y) rotates the beam through \(R_{NED \to body}\). \(\cos\theta_i^{n} = |\hat{\mathbf{u}}^{TX}_i \!\cdot\! \hat{\mathbf{n}}_i|\) uses the heightfield surface normal at the scatterer — this is the Lambert directivity of Brown et al. 2019 (PoSSM). Per-scatterer reflectivities \(\rho_i = |\rho_i|\,e^{j\phi_i}\) carry Rayleigh-distributed magnitude with uniform phase. Absorption \(\alpha(f_c)\) is the Thorp seawater formula (~0.067 dB/m at 300 kHz).
The visibility factor \(V_i \in \{0,1\}\) (or a soft Fresnel knife-edge value in \([0,1]\) when enabled) comes from a DDA ray-march of the TX-to-scatterer segment against the heightfield: the ray is occluded at the first cell where \(z_{ray} > z_{terrain}\). Surface normals \(\hat{\mathbf{n}}_i\) are read from the same heightfield, clamped to a 60° max-slope so single-cell object edges cannot mute their surroundings.
Scatterers are placed uniformly on the heightfield surface (with sub-wavelength normal-aligned jitter to avoid coherent halos). Per Goodman, fully-developed speckle requires \(N_{cell} \gg 1\) random complex scatterers per resolution cell; the bottom-type amplitude is calibrated by
\[ \sigma_z = \sqrt{\frac{\sigma_{bs}(20^\circ)}{2\,\rho\,\sin^2 20^\circ}}, \qquad \mathbb{E}[|\rho_i|] = \sigma_z\sqrt{\pi/2}, \]where \(\rho\) is the scatterer density (m\(^{-2}\)) and \(\sigma_{bs}(20^\circ)\) is the APL-UW backscattering strength (e.g. \(-28\) dB for sand). The amplitude scaling absorbs \(\rho\) so the rendered intensity is density-invariant; \(\rho = 2000\)/m\(^2\) is the production working point, \(\rho = 200\)/m\(^2\) for debug.
A deterministic calibration constant \(K_{PS}\) ties the simulator output to a closed-form analytic prediction for a known point target:
\[ |\text{peak}|^2_{\text{dB}} \;=\; TS \;-\; 40\log_{10}R \;-\; 2\alpha R \;+\; 10\log_{10}(BT), \]which combines two-way spreading, Thorp absorption, and the LFM matched-filter coherent gain \(10\log_{10}(BT)\). The calibration harness drives a single target through the full pipeline and asserts agreement to within ±1 dB.
One CUDA thread per \((c, i)\) pair computes the carrier rotation \(e^{-j2\pi f_c \tau}\) in FP64, multiplies the pre-sampled chirp, and atomicAdds the result into an upsampled \((n_{ch}, K\!\cdot\!n_{samp})\) accumulator. The buffer is then FFT-domain low-passed and decimated to \(f_s\) — the oversampling preserves sub-sample delay precision that would otherwise quantize to \(\pm 1/(2 f_s)\) range bins.